Hello I'm
Sawera Yaseen
I am an Erasmus Mundus Scholar in Intelligent Field Robotic Systems (IFRoS). This joint master’s program is offered by Universitat de Girona, Spain, and the University of Zagreb, Croatia. Currently, I am working on my Master’s thesis at the Smart Mechatronics and Robotics (SMART) research group at Saxion University of Applied Sciences. My research focuses on the detection of invisible obstacles for drone obstacle avoidance. I am passionate about robot perception and autonomous navigation, with a strong interest in applying robotics and AI to solve real-world challenges. My goal is to contribute to cutting-edge advancements in robotics, particularly in intelligent autonomous systems.
Education
2023 – Present
Erasmus Mundus Joint Master's in Intelligent Field Robotic Systems
- Semester 1 & 2 – University of Girona: Autonomous Systems, Multiview Geometry, Machine Learning, Probabilistic Robotics, Robot Manipulation, Hands-on Planning, Hands-on Perception, Hands-on Localization, Hands-on Intervention
- Semester 3 – University of Zagreb (Specialization in Aerial Robotics and Multi-Robot Systems): Aerial Robotics, Multi-Robot Systems, Deep Learning, Robotic Sensing Perception and Actuation, Human-Robot Interaction, Ethics and Technology
2018 – 2022
Bachelor's in Mechatronics Engineering (CGPA: 3.95/4.00)
Mehran University of Engineering and Technology, Jamshoro, Pakistan
Thesis: Deep Learning Based Smart Spraying System for Disease Detection of Vegetables
Projects

Controlling a Swarm of Crazyflies using Reynolds Rules and Consensus Protocol
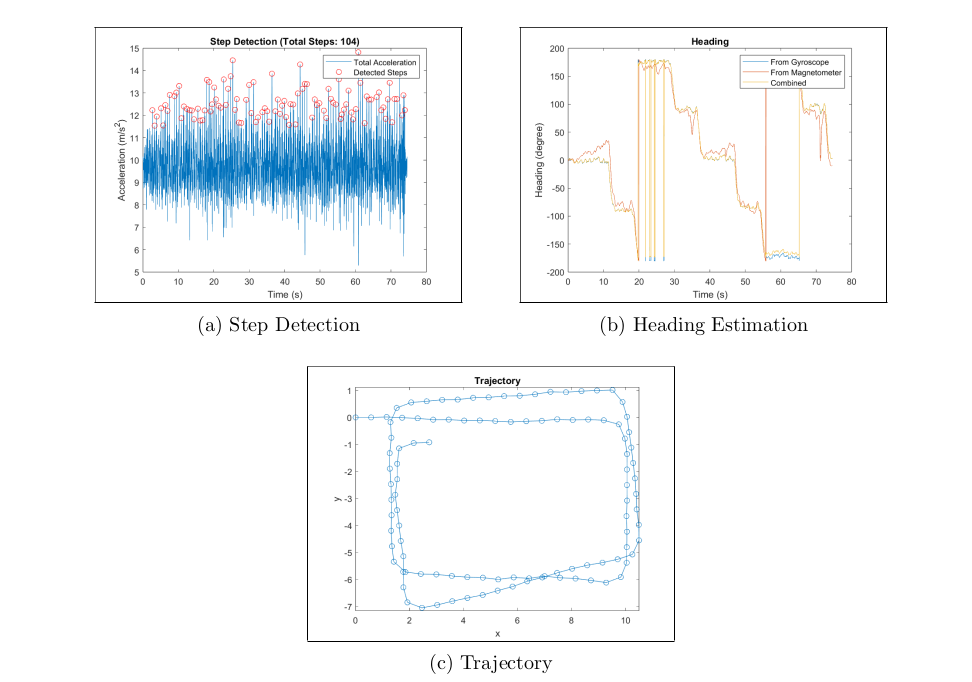
Pedestrian Dead Reckoning (PDR)
Human Detection and Tracking
Stereo Visual Odometry Using the KITTI Dataset
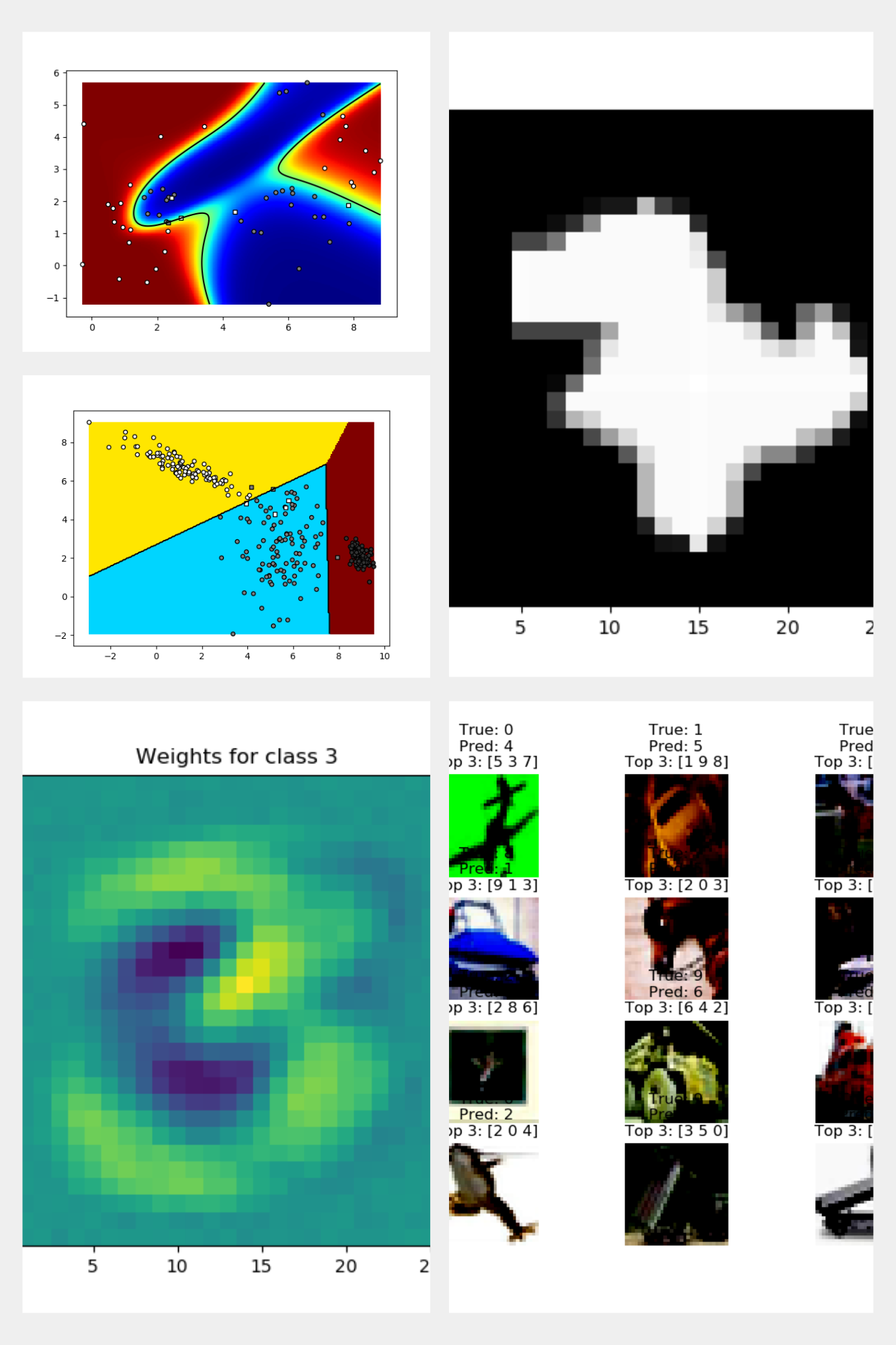
Deep Learning Lab Work
Aerial Robotics Lab Work
Frontier Based Exploration
EKF based SLAM using ArUco Markers
Kinematic Control System for a Mobile Manipulator
Real-Time 2D Pose Estimation for Automated Parts-Picking
TurtleBot Online Path Planning
Autonomous Object Handling with Behavior Trees in TurtleBot
Task-Priority Kinematic Control
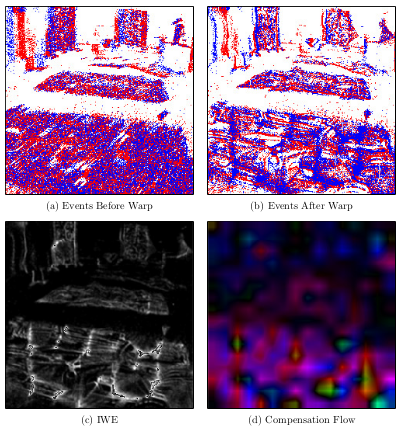
Event-based Cameras
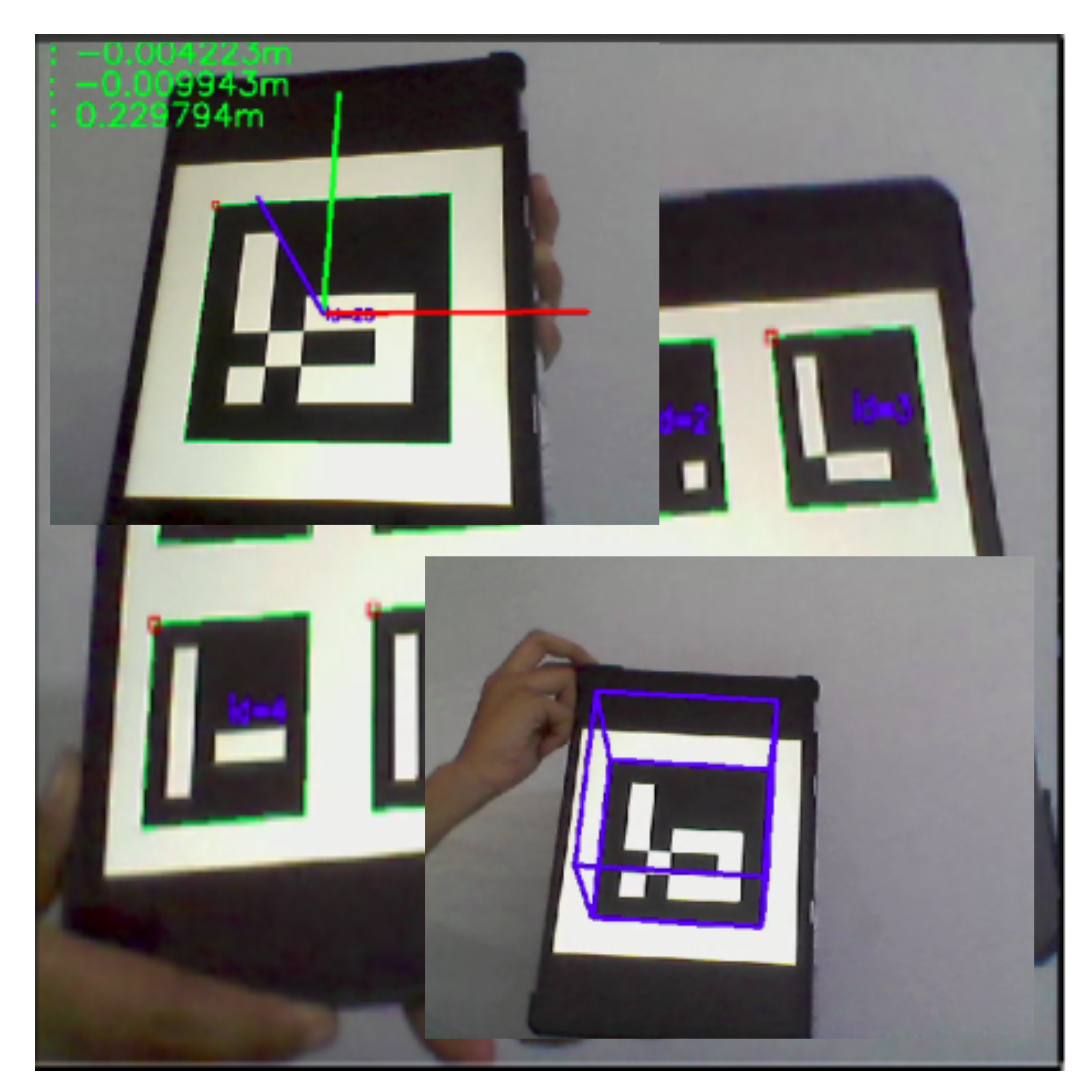
Computer-vision applications using ArUco marker
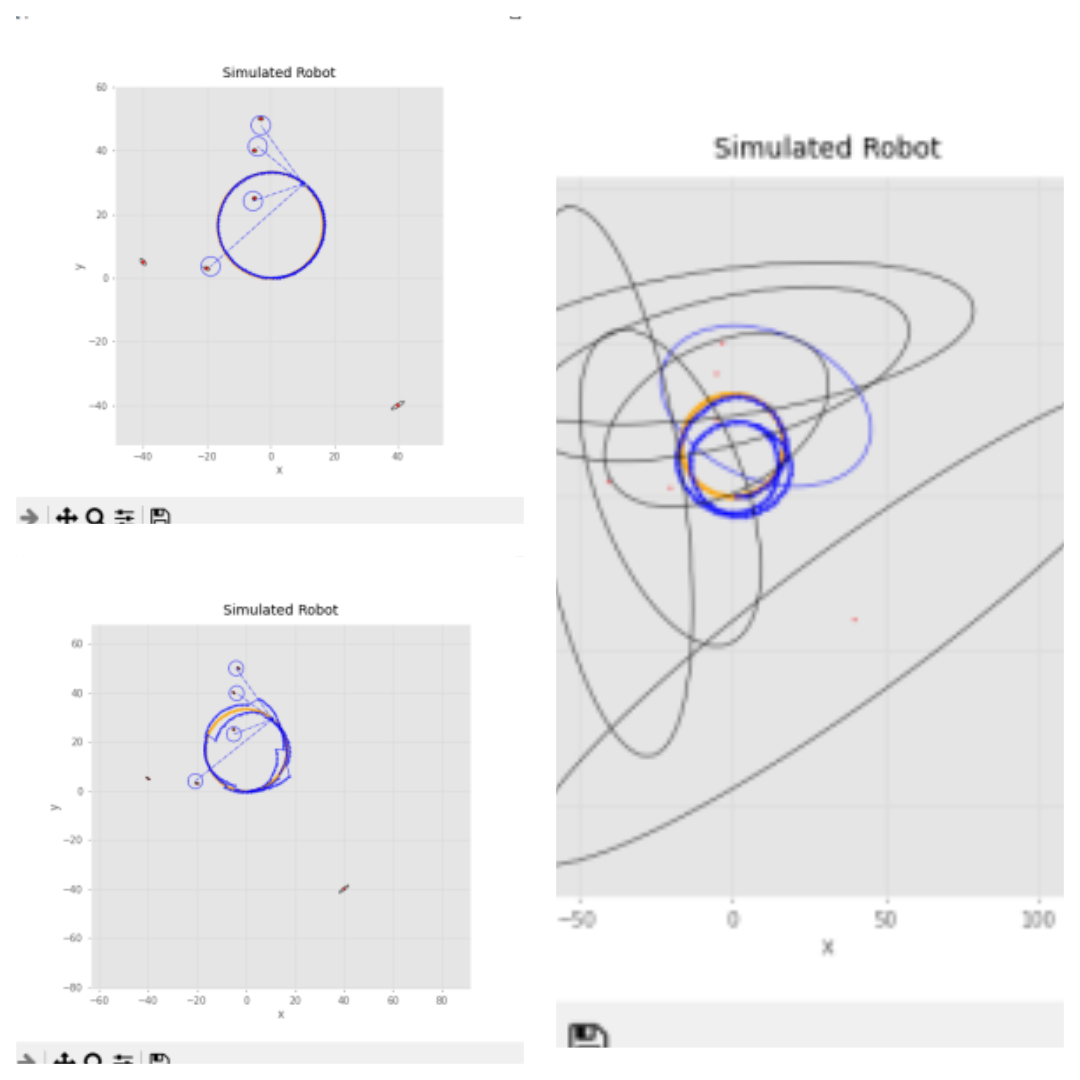
Extended Kalman Filter (FEKF) for SLAM
Palletizing operation with UR3e Collaborative Robot
Classification and Pick-and-Place with the Staubli TS-60
Assembly and Pick-and-Place with the Staubli TX-60
Reinforcement Learning-Based Path Planning
Deep Learning Based Smart Spraying System for Disease Control of Vegetables (Bachelor's Final Year Project)
Skills
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()


![]()